科尔摩根RGM机器人关节模组组装简介
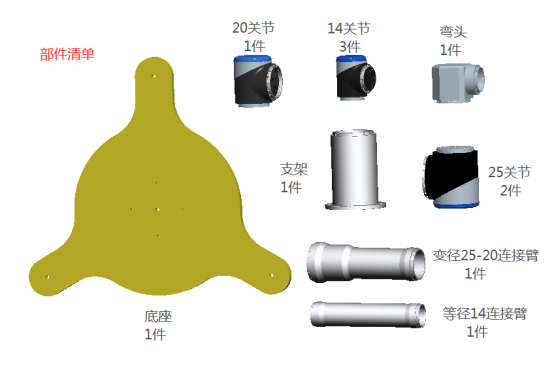
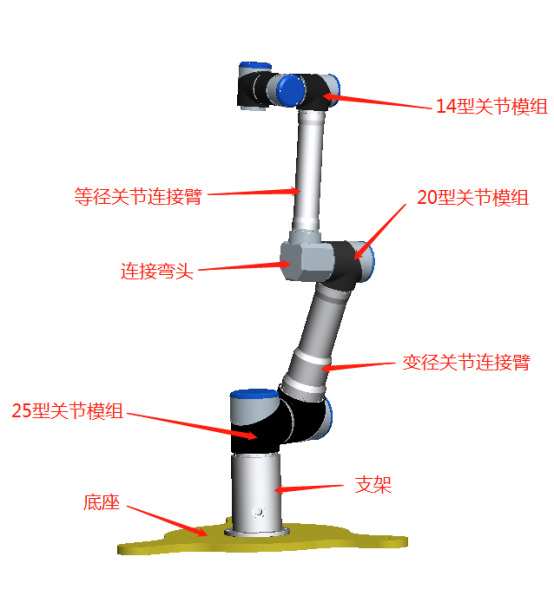
使用科尔摩根机器人RGM机器人关节模组搭建一套完整的六轴协作机器人,除模组外,还需要以下几个关键部位:底座、支架、关节之间的连接臂、不同规格关节转换用的连接件。
根据客户不同的需求,便于为客户快速的集成多轴的协作机器人,慧摩森为客户制定合理的结构 方案。下面将结合组装应用对这些零件进行说明。
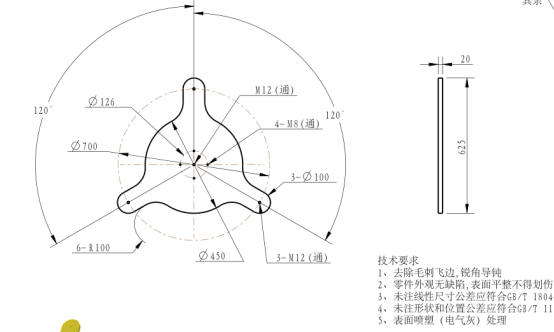
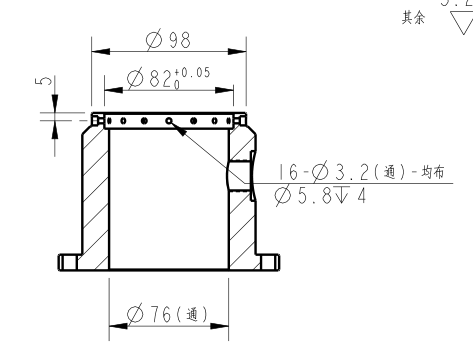
1.底座是承载和固定整个机器人的主要部件,使用的材料是A3钢,在客户的使用中,有两种情况:一种
是客户进行固定使用,客户在使用时将机器人通过螺栓固定在地面上或其他的设备体上来使用,
这时候其设计满足使用刚性即可,也可以不使用底座,直接将支架进行固定即可。还有一种是不需要
进行固定的情况下,在设计的时候需要考虑底座要有足够的重量,来稳固机器人的重心,并要根据机
器人设计的回转半径来设计底座的支撑点半径尺寸。
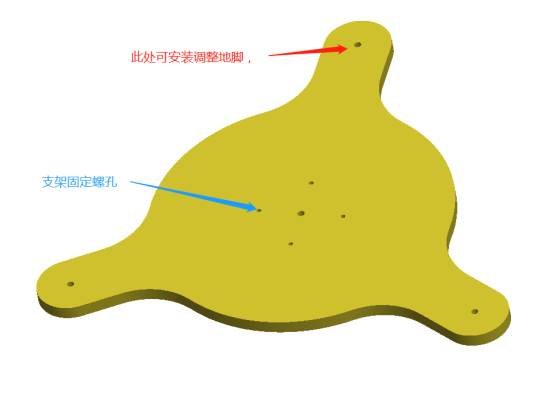
2.支架的用途是连接机器人关节和底座,并可以通过改变支架的设计高度,来调节客户对不同使用环境
高度的需求,支架可以固定在底座上,也可以直接固定在地面上或其他机台上。材料采用铝合金材质。
注:支架产品可分为25型和20型两种。支架高度范围为100mm~500mm.可支持个性化定制。
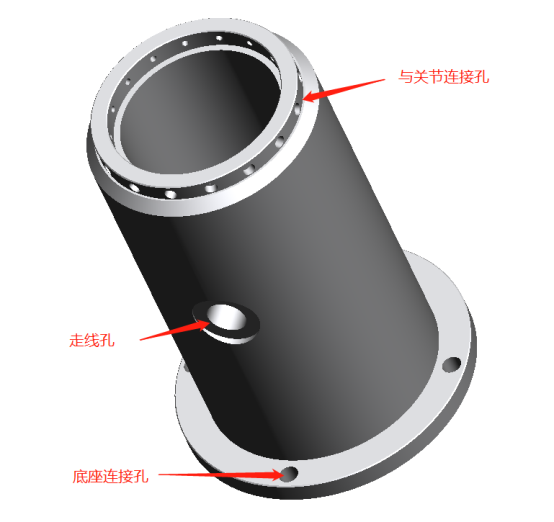
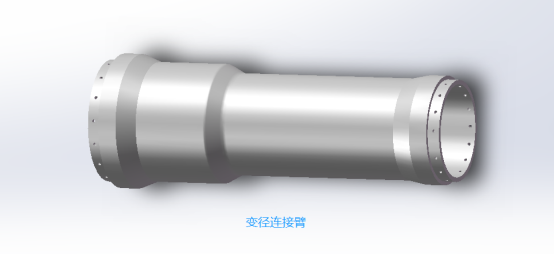
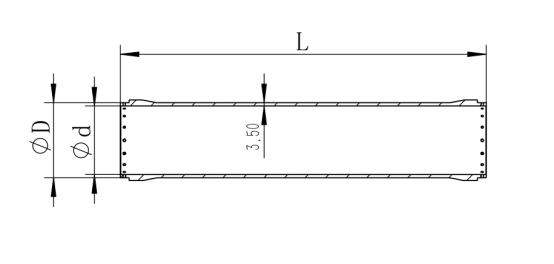
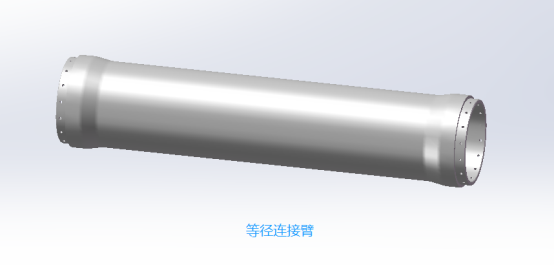
3.关节之间的连接臂:连接臂主要功能是实现关节之间的连接,通过设计不同的长度来实现机器人整体
的回转半径的关键零件,材料为铝合金材质。在结构上有四种不同的直径尺寸来对应科尔摩根的四款关节
产品。(注:也可以设计为变径结构来实现不同型号的关节连接)
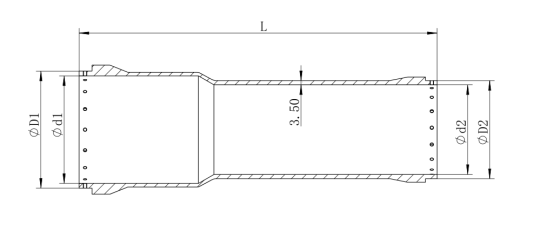
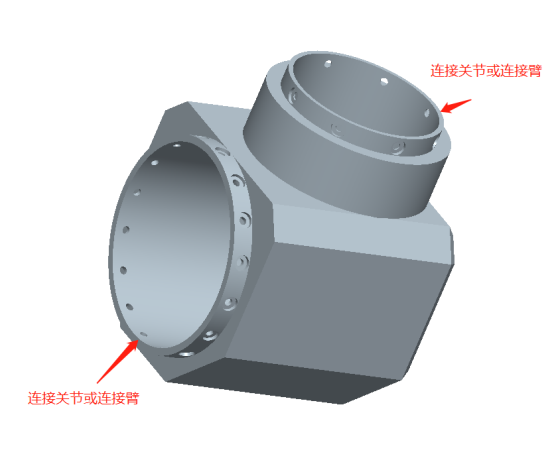
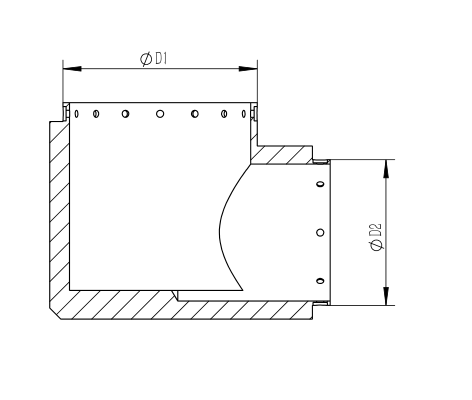
4.关节转换连接件(弯头):主要是做方向转换和规格转换用,也可以设计成三通结构来连接两个关节,
作为多手臂关节机器人组合设计使用。材料为铝合金材质。
以上这些需要简单的机加和设计便可以得到,周期短,效率高,减少客户的研发周期。通过我们的集成,能够更好的发挥RGM关节模组整体性能。