IncOder绝对值编码器在潜水机器人上的应用


潜水机器人已成为深水作业不可缺少的工具。Celera公司InOder系列编码器输出高分辨率数字位置信号,采用耐腐蚀阳极化铝合金外壳,能够应用于恶劣工作环境,在潜水机器人行业得到很好的应用。
需求及挑战
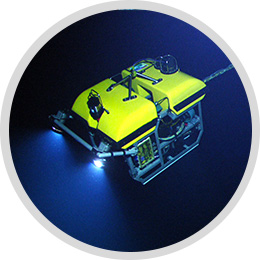
ROVs(远程操作水下工作车),即潜海机器人,是一种由水面上人工远程操纵的UUVs(无人驾驶水下工作车)。ROVs已发展成为深水环境海上石油及天然气开采必备的工具车。Class I11级别的ROVs通常比较庞大,尺寸及重量堪比小型汽车,并能完成复杂的水下作业,例如杂物清理,阀门开启及关闭等。
受到深海水压的影响,对机械手的位置精度控制、接触压力反馈控制等提出了更高的指标及可靠性要求。机械手采用直流无刷电机驱动,是一套包含模拟量输出旋转变压器的浸油系统,以满足深海应用在高水压情况下获得高可靠性位置反馈的需求。传统的旋转变压器通常尺寸庞大、需要外部AC激励、同时配备额外的信号处理硬件以获取模拟量位置输出信号。
Celeramotion解决方案
IncOder系列编码器不仅具备传统模拟量输出旋转变压器坚固耐用的特性,还能提供高分辨率的数字位置信号。IncOder编码器位置反馈装置,采用DC供电,标准输出为数字信号,可以很轻松地集成到闭环控制系统之中。带V标志IncOder在真空环境下制造,能够消除编码器灌封时产生的空隙及气泡,可以应用于浸油环境及高压环境。该系列编码器采用耐腐蚀阳极化铝合金外壳,尺寸紧凑,大中心孔,厚度很小。适合ROVs应用需求。
应用效果
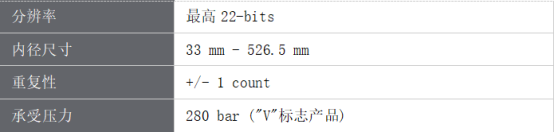
该应用采用了22位高分辨率IncOder编码器,为ROVs工程车的各个机械手臂提供了更高的转矩感应及控制精度,可以实现更加复杂的操作功能。尤其在深海高压情况下,采用了IncOder编码器的ROVs展现了很好的工作特性及拓宽了工作能力。
INcOder编码器尺寸紧凑、厚度小等特性使得机械手臂尺寸更小,重量更轻,有效降低了机械手和工程车连接部位承受的冲击,提高可靠性。
IncOder编码器参数
摘自Celeramotion网站